
Виды драйверов.
По типу их можно подразделить на:
Линейные. Они наиболее подходящие, если входное напряжение не стабильно. Отличаются улучшенной стабилизацией. Распространены мало по причине низкого КПД. Выделяет большее количество тепла, подходит для маломощной нагрузки.
Внутреннее устройство драйвера
Внешний вид и схема драйвера LED 1338G7.
Импульсные. Основаны на микросхемах ШИМ. Обладают высоким КПД. Отличаются малым нагревом и длительным сроком службы.
ШИМ-драйвер Recom.
Микросхемы ШИМ создают значительный уровень электромагнитных помех. Людям с кардиостимуляторами не рекомендовано находится в помещениях, где применяются такие драйвера для питания светодиодов.
Драйвер, работающий с диммером. Принцип основан на использовании ШИМ-контроллера. Принцип состоит в том, что регулируется сила тока на светодиодах. Низкокачественные изделия дают эффект мерцания.

Драйвер с диммером.
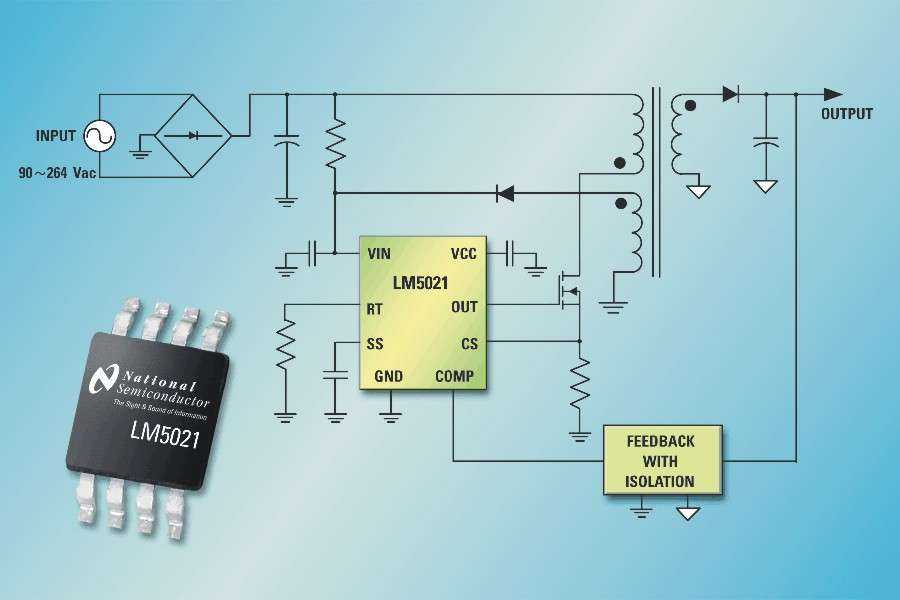
LED драйвер на 220 В.
Существует немало уже готовых светодиодных драйверов промышленного производства. Естественно, они обладаю различными характеристиками. Их особенность в том, что они питаются от сети 220 В переменного напряжения и могут работать в широком диапазоне питающего напряжения. Задача, у них все та же. Выдать определенную силу тока. Многие промышленные изделия уже имеют гальваническую развязку. Гальваническая развязка предназначена для передачи электроэнергии без непосредственного соединения входной и выходной частей схемы. Это дополнительные очки в плане электробезопасности (простейшей и исторически первой гальванической развязкой считается обычный трансформатор). Обычно они имеют нестабильность не более 3 %. В подавляющем большинстве сохраняют работоспособность от 90-100 Вольт и до 260 Вольт. В магазинах очень часто их могут называть:
- блок питания (БП),
- источник тока,
- адаптер питания,
- источник питания.
Это все одно и тоже устройство. Продавцы не обязаны обладать техническим образованием.
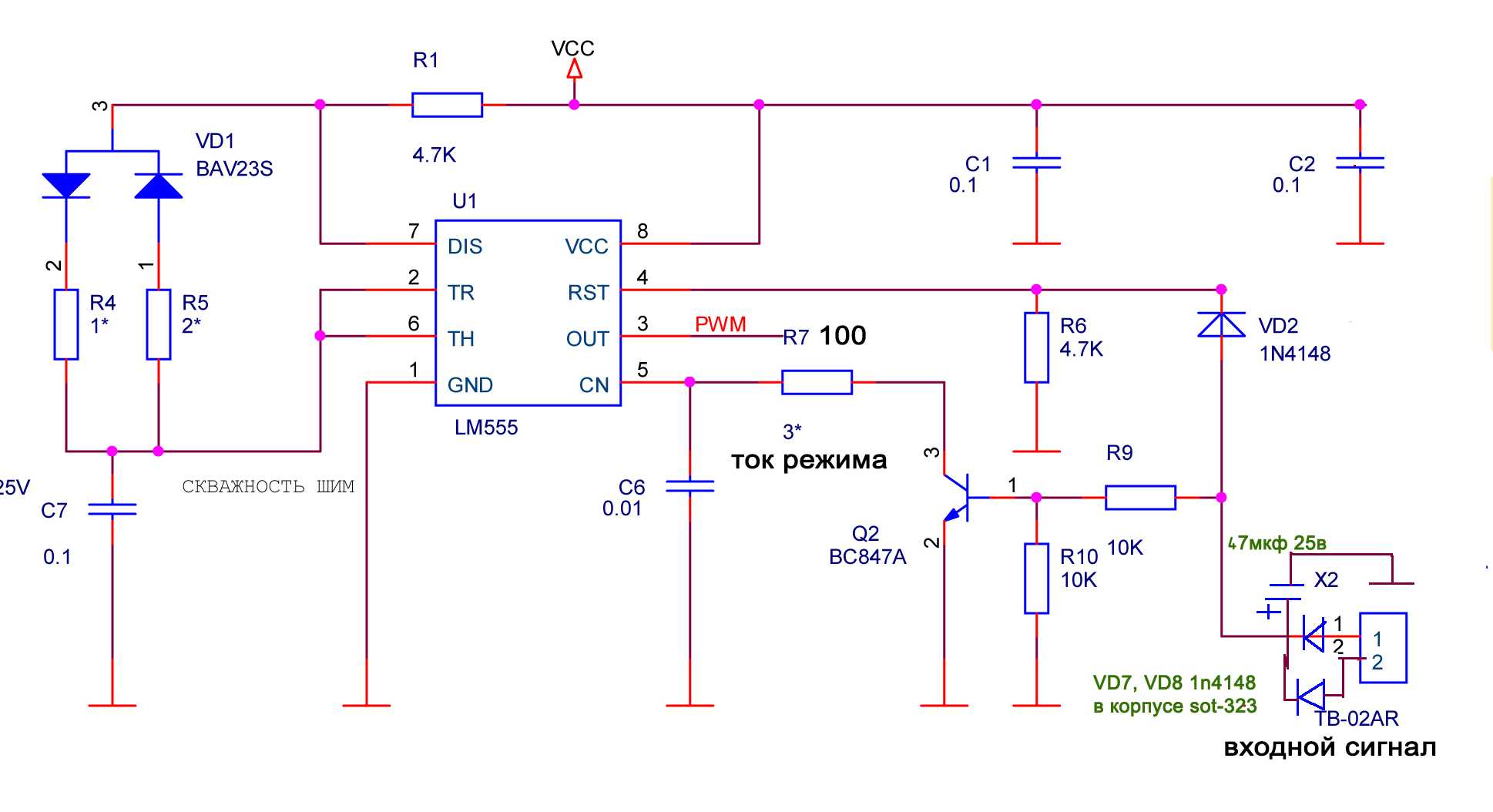
Характеристики ШИМ сигнала
Важными характеристиками ШИМ сигнала являются:
амплитуда (U);
частота (f);
скважность (S) или коэффициент заполнения D.
Амплитуда в вольтах задается в зависимости от нагрузки. Она должна обеспечивать номинальное напряжение питания потребителя.
Частота сигнала, модулируемого по ширине импульса, выбирается из следующих соображений:
Чем выше частота, тем выше точность регулирования.
Частота не должна быть ниже времени реакции устройства, которым управляют с помощью ШИМ, иначе возникнут заметные пульсации регулируемого параметра.
Чем выше частота, тем выше коммутационные потери. Он возникают из-за того, что время переключения ключа конечно. В запертом состоянии на ключевом элементе падает все напряжение питания, но ток почти отсутствует. В открытом состоянии через ключ протекает полный ток нагрузки, но падение напряжения невелико, так как проходное сопротивление составляет единицы Ом. И в том, и в другом случае рассеяние мощности незначительно. Переход от одного состояния к другому происходит быстро, но не мгновенно. В процессе отпирания-запирания на частично открытом элементе падает большое напряжение и одновременно через него идёт значительный ток. В это время рассеиваемая мощность достигает высоких значений. Этот период невелик, ключ не успевает значительно разогреться. Но с повышением частоты таких временных промежутков за единицу времени становится больше, и потери на тепло повышаются
Поэтому для построения ключей важно использование быстродействующих элементов.
При управлении электродвигателем частоту приходится уводить за пределы слышимого человеком участка – 25 кГц и выше. Потому что при более низкой частоте ШИМ возникает неприятный свист.
Эти требования часто находятся в противоречии друг к другу, поэтому выбор частоты в некоторых случаях – это поиск компромисса.
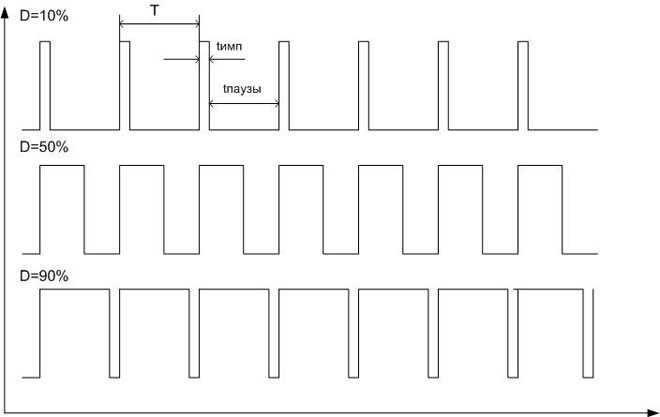
Величину модуляции характеризует скважность. Так как частота следования импульсов постоянна, то постоянна и длительность периода (T=1/f)
Период состоит из импульса и паузы, имеющих длительность, соответственно, tимп и tпаузы, причем tимп+tпаузы=Т. Скважностью называется отношение длительности импульса к периоду – S=tимп/T. Но на практике оказалось удобнее пользоваться обратной величиной – коэффициентом заполнения: D=1/S=T/tимп. Еще удобнее выражать коэффициент заполнения в процентах.
Необходимость установки
Обязательно используются контроллеры для схем, в которых присутствуют свинцово-кислотные АКБ. Это связано с тем, что такие элементы питания негативно воспринимают как перезаряд, так и значительное разряжение. В первом случае может произойти быстрый выход из строя батареи за счет закипания электролита или даже взрыва банок с ним. Во втором случае процесс приводит к разрушению пластин.
Нередко для импульсных источников питания или в источники бесперебойного питания встраивают PWM-элементы. Встречаются они и в инверторах.
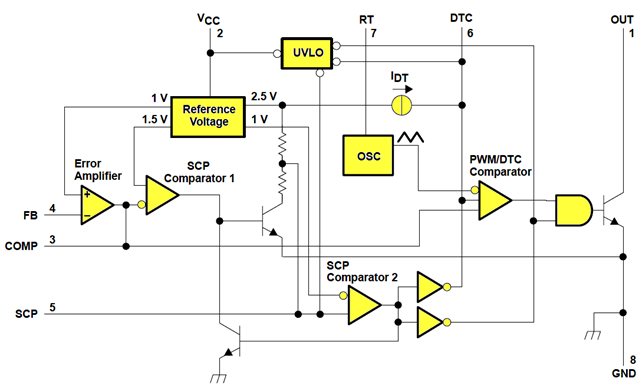
Интегральный ШИМ-контроллер с токовым режимом управления в компактном корпусе TSOP-6
Обычно разъединение происходит при достижении двенадцативольтовым аккумулятором уровня 10,5 или 11 В. В таком случае за 10 часов непрерывной работы падение емкости составит со 100% до примерно 20%. В процессе более быстрого разряжения емкость будет уменьшаться.
В определенных условиях допускается коррекция напряжения отключения во время изготовления или настроечного процесса. Однако, на прилавках доминирует не регулятор напряжения, а прибор с типовым уровнем выходных параметров.
Ориентироваться по затратам поможет таблица:
| Блок | Период эксплуатации, лет | Стоимость (% от стоимости оборудования) |
| Солнечный потребитель | 25-30 | 20-30% |
| Контроллер заряда | 10 | 2-5% |
| АКБ | 2-6 | 45-60% |
| Дополнительное оборудование | более 10 | 10% |
Исходя из пропорций затрат, очевидно, что PWM-элементы не являются большой статьей затрат в схеме. При этом они играют важную роль в процессе обеспечения эффективности системы, продлевая срок службы остального оборудования.
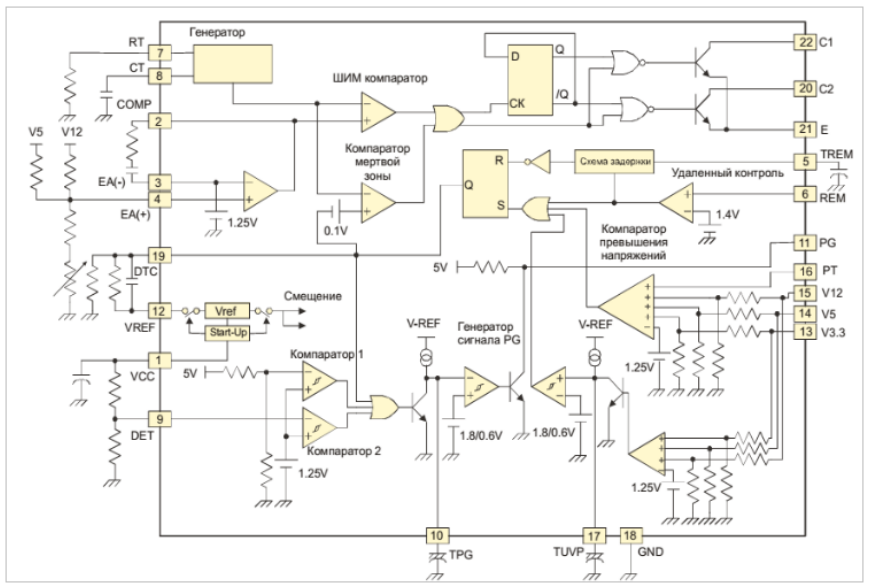
Структура ШИМ-контроллеров NCP1237, NCP1238, NCP1287 и NCP1288
Микросхемы этих типов практически идентичны по цоколевке и схеме включения. В них используется режим управления по току с фиксированной частотой преобразования. Микросхемы предназначены для применения в обратноходовых преобразователях (Flyback) c гальванической развязкой (трансформатор, управление — обратная связь по напряжению через оптрон, по току — через дополнительную обмотку силового трансформатора). На рис. 4 показана структурная схема ШИМ-контроллера NCP1237.
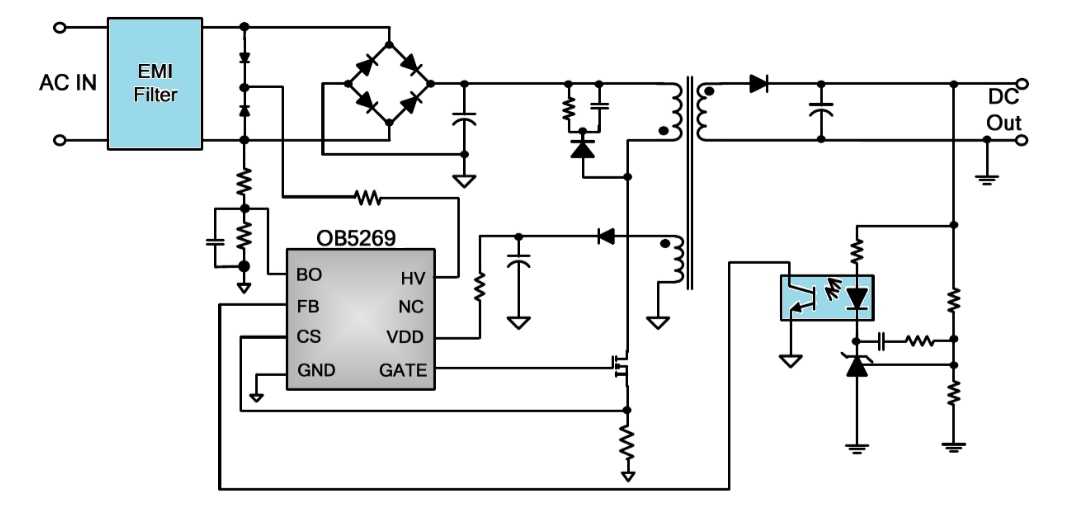
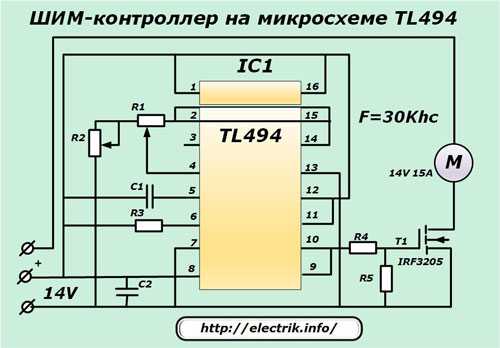

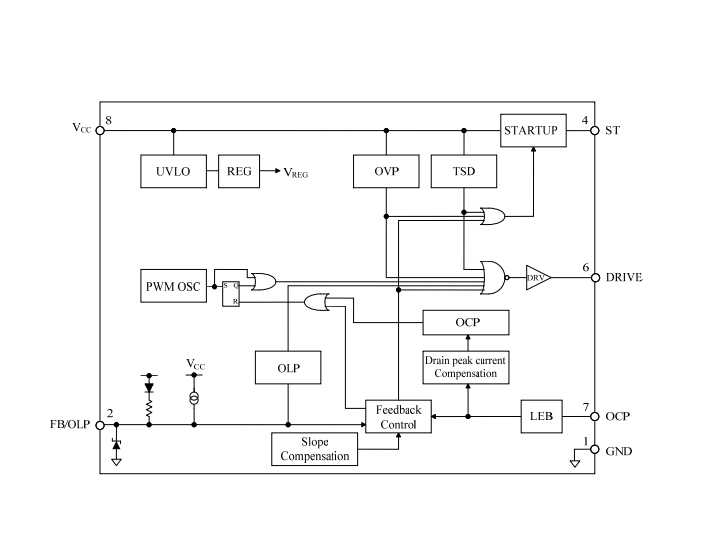
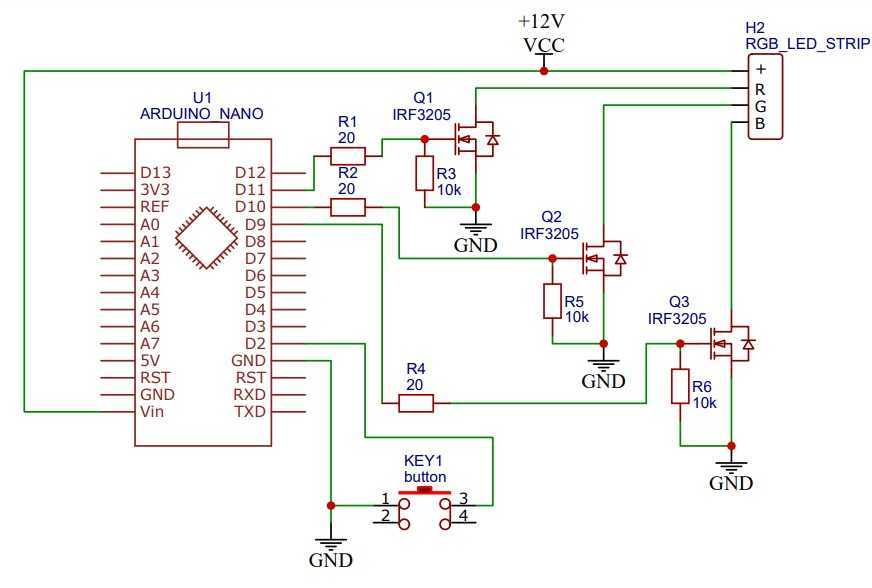
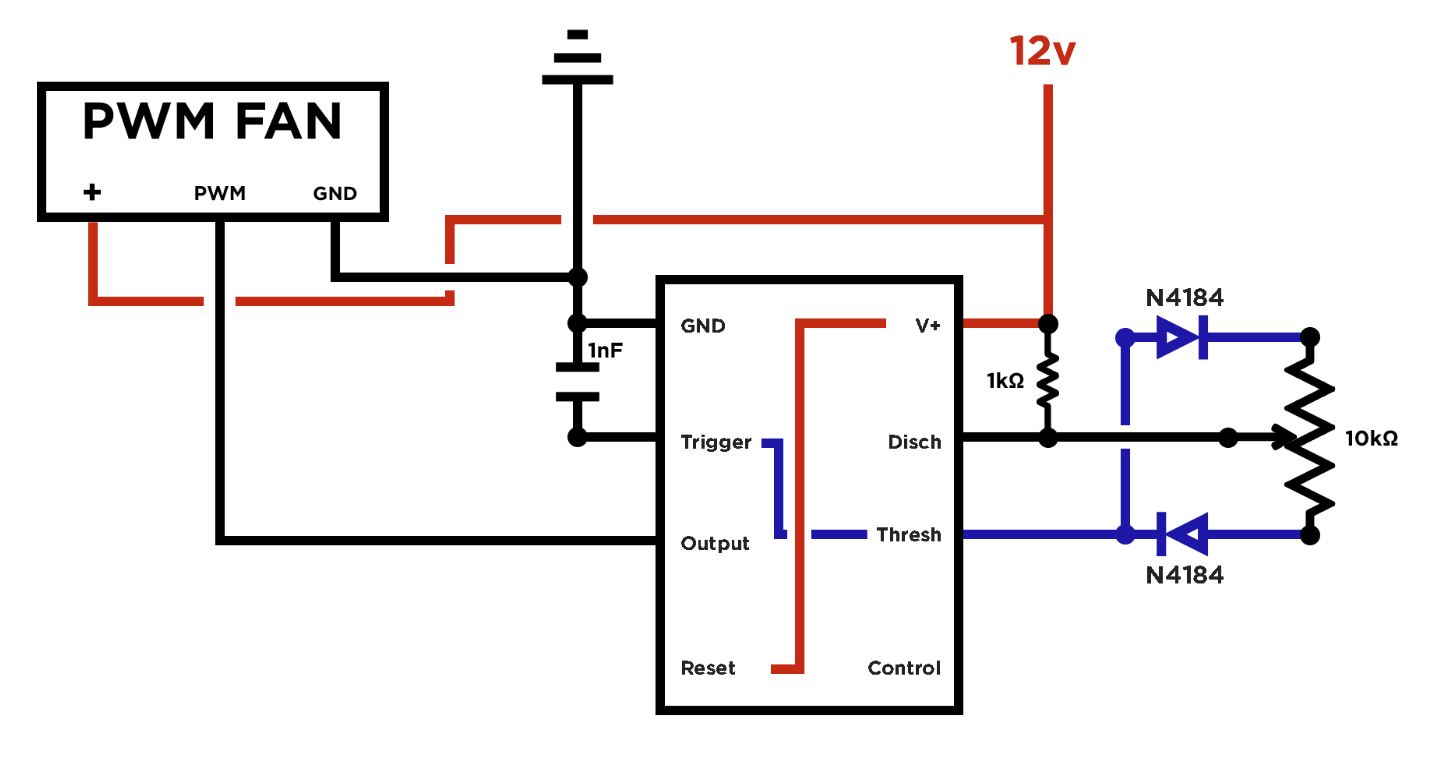
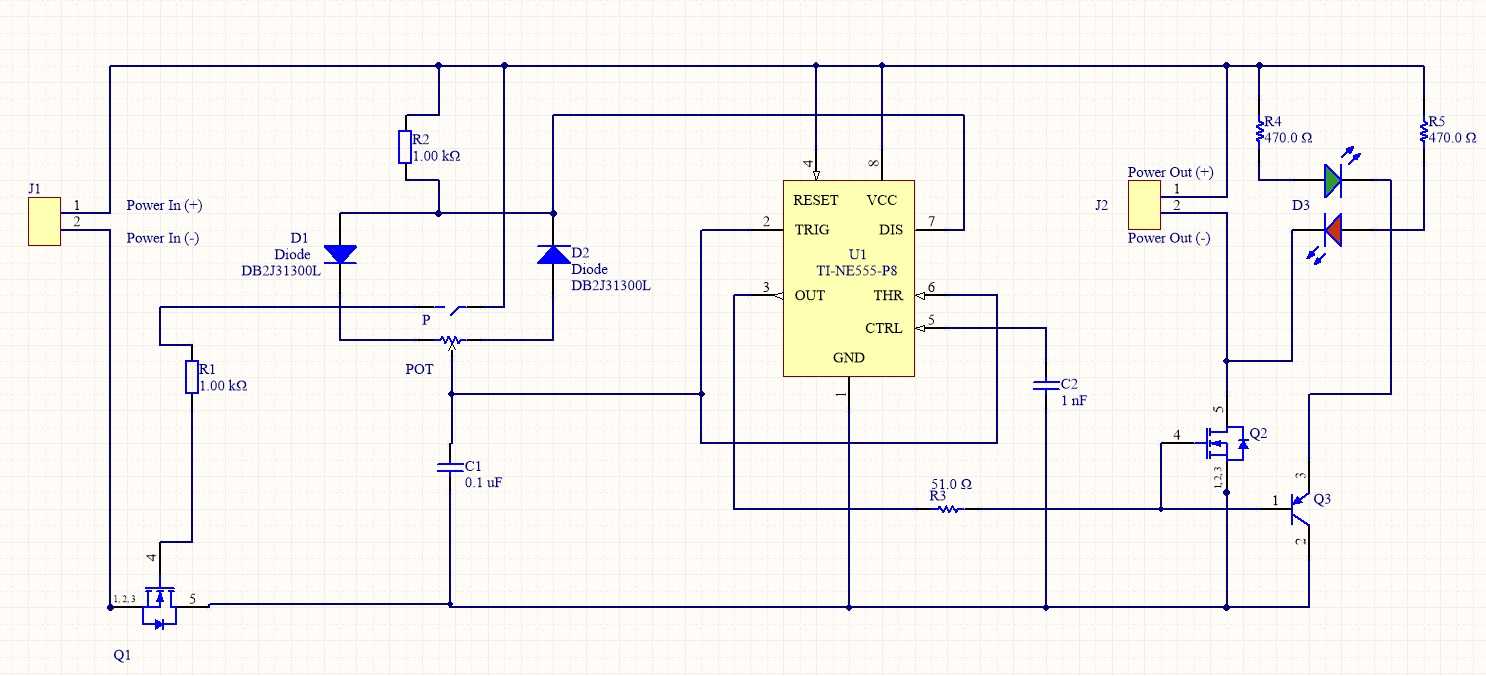
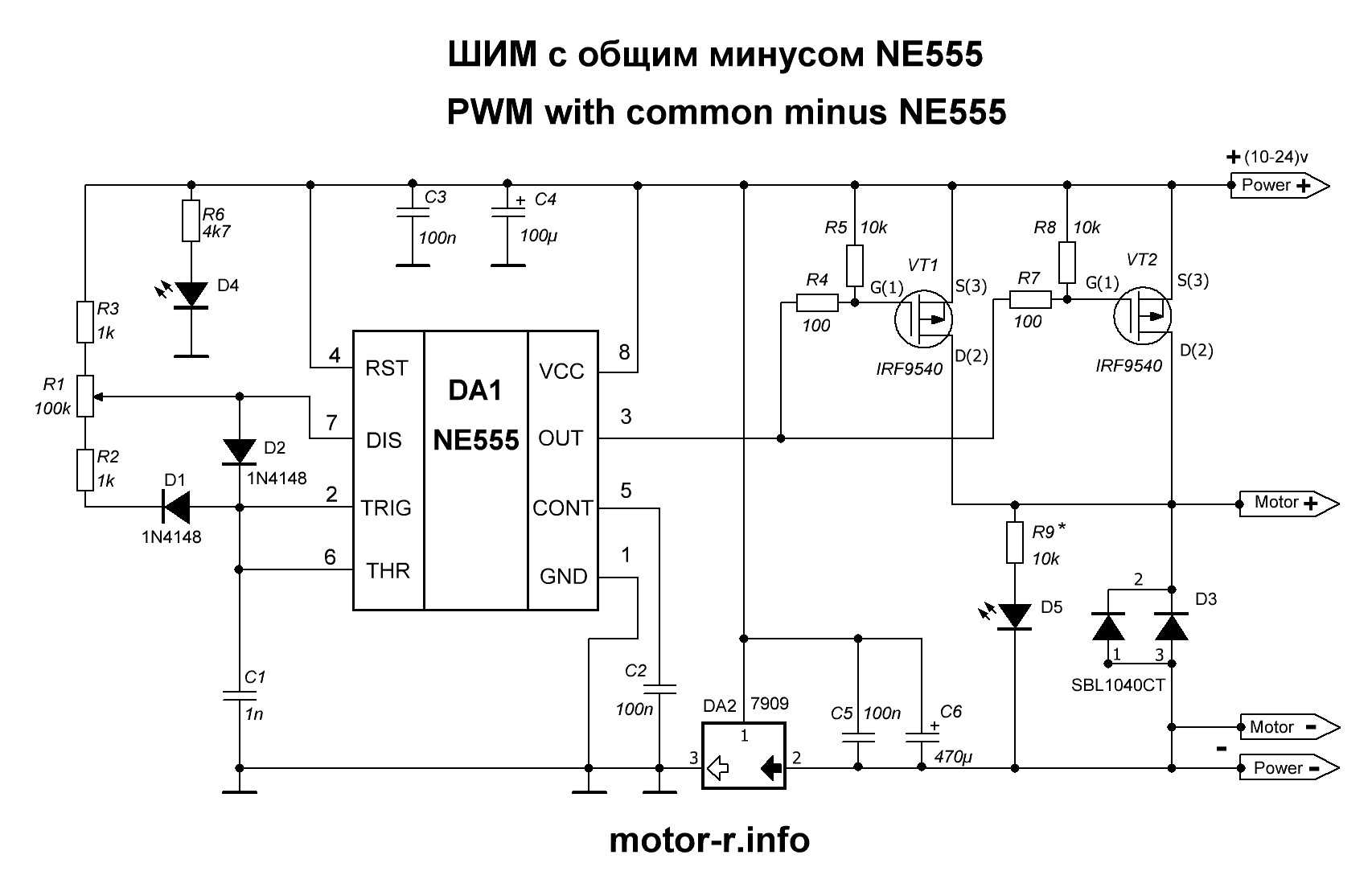
Рис. 4. Структурная схема ШИМ-контроллера NCP1237
Встроенная схема Dynamic Self-Supply (DSS) упрощает проектирование и обеспечивает уменьшение дополнительных элементов. Наличие режима Soft-Skip с пропуском циклов обеспечивает повышение эффективности преобразования при малых нагрузках с сохранением низкого потребления в дежурном режиме. Также поддерживается и понижение частоты преобразования до 31 кГц (frequency foldback) с гистерезисом. Порог включения режима — 1,5 В, обратный переход в рабочий режим происходит при превышении порога 1 В. При понижении напряжения сигнала обратной связи ниже порога 0,7 В активизируется режим пропуска циклов Soft-Skip, который позволяет уменьшить потребление дополнительно, а также уменьшить возникновение акустического шума на трансформаторе и конденсаторах, использовать более дешевые трансформаторы. Встроенный двухпороговый защитный таймер служит для защиты при сбоях и нарушениях работы схемы управления вследствие скачков тока. Встроенная схема формирования джиттера частоты обеспечивает «размывание» спектра и уменьшение пиковых уровней ЭМИ. Контроллер также включает новую схему высоковольтного каскада, которая совместно со схемой старта позволяет оценивать уровень сигнала с токового датчика как в цепи переменного напряжения, так и в цепи постоянного выпрямленного напряжения. ON Semiconductor использует высоковольтную технологию входных цепей контроллера, поэтому NCP1288 может подключаться по питающим цепям непосредственно к шине высокого напряжения питания.
Режим блокировки для NCP1237 (рис. 5) может активизироваться по одному из двух условий: при повышении уровня напряжения выше порогового на входе Latch за счет перенапряжения или при уменьшении напряжения ниже другого заданного порога за счет терморезистора с отрицательным температурным коэффициентом, стоящего на силовом транзисторе.
Рис. 5. Типовая схема включения ШИМ-контроллера NCP1237
Токовый источник HV startup обеспечивает заряд конденсатора VCC до порогового напряжения VCC (on) и работает, пока входное напряжение более VHV (start), обеспечивая режим включения. Затем контроллер производит плавный пуск Soft-Start, во время которого ток потребления линейно возрастает перед включением режима регулирования. Во время периода плавного старта блокировка игнорируется, а ток блокировки удваивается, обеспечивая быстрый предзаряд конденсатора на входе вывода блокировки.
В микросхемах реализована защита от короткого замыкания на выходе.
Частота преобразования — 65/100/133 кГц и определяется модификацией микросхем. Микросхемы рассчитаны на использование в расширенном температурном диапазоне от -40 до +125 °С, что особенно актуально для промышленных приложений. Типовые применения контроллеров:
- сетевые источники питания принтеров, мониторов;
- зарядные устройства для аккумуляторов;
- встроенные сетевые источники бытовой аппаратуры.
Разновидности контроллеров
В фотоэлектрических схемах распространены несколько типов таких элементов. Они дифференцируются не только по стоимости, но и по алгоритмам работы, способам установления параметров тока и пр.
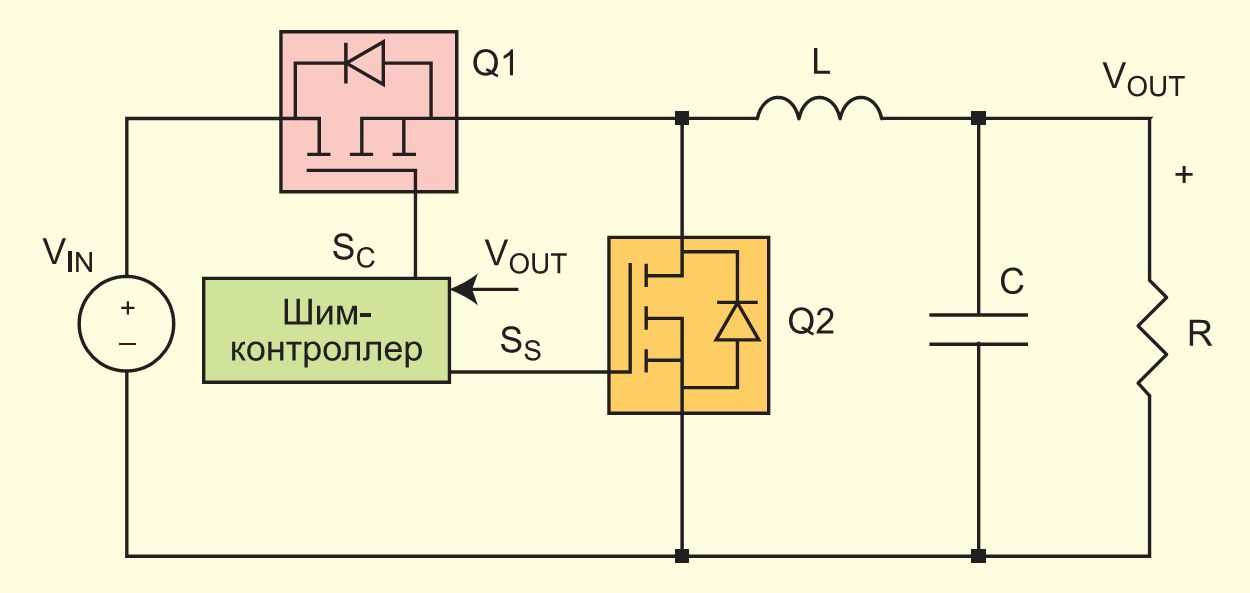
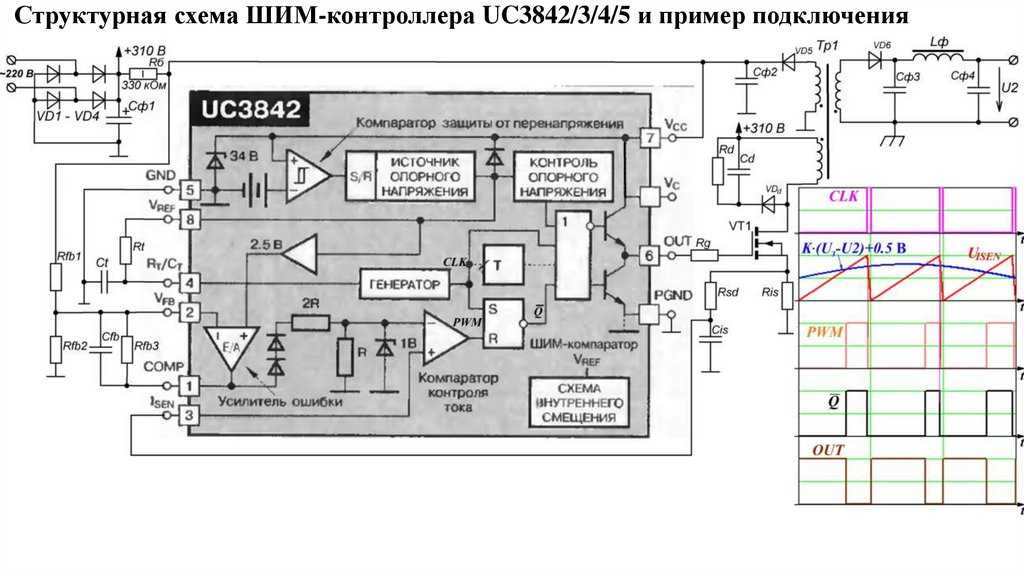
Типовая схема включения ШИМ-контроллера
Наиболее простые по конструкции всего лишь разрывают цепь и блокируют от нее источник, когда на ней достигается определенное напряжение, например, уровень 14,4 В. При падении до уровня 12-13 В блок питания снова собирает цепь для зарядки. В таком цикле степень зарядки АКБ составляет примерно 60%. Стабильный недозаряд приводит к образованию сульфатации на свинцовых пластинах и в скором времени выходе из строя источника питания.
Данный тип практически не выпускается серийно, но встречается у мастеров-самоделок. Они выпускают элементы для экономии по бросовым ценам, хотя в итоге экономия оказывается иллюзией из-за скорой поломки АКБ.
PWM регуляторы являются более продвинутой технологией и позволяют дозаряжать КБ до 100%. В процессе получается несколько стадий заряда батареи:
- осуществляется подача на клеммы максимального тока, что позволяет АКБ потреблять его весь, поступающий от солнца на модули в данную минуту;
- при шим заряде уровень напряжения достигает установленного параметра и осуществляется постоянная поддержка параметра, чтобы избежать газообразования в банках (сила тока медленно снижается);
- происходит выравнивание, ведь для большинства АКБ является естественным получение заряда до уровня газообразования при выравнивании напряжения на всех емкостях с электролитом (очищаются пластины, и перемешивается жидкость внутри);
- стабилизация и постепенное снижение напряжения проводится, когда батарея получает полный заряд, не допуская перегрева.
Схема с динамическим источником питания и интегрированным высоковольтным пусковым полевым транзистором
Производители предлагают свои контроллеры даже со специальными информативными элементами:
- световой индикацией;
- жидкокристаллическими экранами;
- многофункциональными мониторами.
В определенных моделях встречается функционал, позволяющий определить уровень заряда АКБ. За счет этой опции можно настроить работу под конкретную батарею, пролонгировав ее период эксплуатации.
Чтобы проконтролировать максимально достоверно SOC, необходимо мониторить несколько циклов зарядки батареи и провести самостоятельный расчет по достаточно громоздким формулам.
Причины и области применения ШИМ
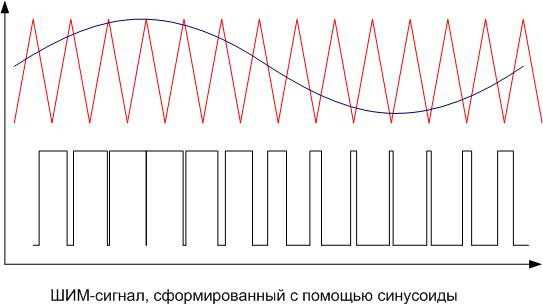
Принцип широтно-импульсной модуляции используется в регуляторах частоты вращения мощных асинхронных двигателей. В этом случае модулирующий сигнал регулируемой частоты (однофазный или трехфазный) формируется маломощным генератором синусоиды и накладывается на несущую аналоговым способом. На выходе получается ШИМ-сигнал, который подается на ключи потребной мощности. Дальше можно пропустить получившуюся последовательность импульсов через фильтр низкой частоты, например через простую RC-цепочку, и выделить исходную синусоиду. Или можно обойтись без нее – фильтрация произойдет естественным образом за счёт инерции двигателя. Очевидно, что чем выше частота несущей, тем больше форма выходного сигнала близка к исходной синусоиде.
Возникает естественный вопрос – а почему нельзя усилить сигнал генератора сразу, например, применением мощных транзисторов? Потому что регулирующий элемент, работающий в линейном режиме, будет перераспределять мощность между нагрузкой и ключом. При этом на ключевом элементе впустую рассеивается значительная мощность. Если же мощный регулирующий элемент работает в ключевом режиме (тринистор, симистор, RGBT-транзистор), то мощность распределяется во времени. Потери будут намного ниже, а КПД – намного выше.

В цифровой технике особой альтернативы широтно-импульсному регулированию нет. Амплитуда сигнала там постоянна, менять напряжение и ток можно лишь промодулировав несущую по ширине импульса и впоследствии усреднив её. Поэтому ШИМ применяют для регулирования напряжения и тока на тех объектах, которые могут усреднять импульсный сигнал. Усреднение происходит разными способами:
- За счет инерции нагрузки. Так, тепловая инерция термоэлектронагревателей и ламп накаливания позволяет объектам регулирования заметно не остывать в паузах между импульсами.
- За счёт инерции восприятия. Светодиод успевает погаснуть от импульса к импульсу, но человеческий глаз этого не замечает и воспринимает как постоянное свечение с различной интенсивностью. На этом принципе построено управление яркостью точек LED-мониторов. Но незаметное мигание с частотой несколько сот герц все же присутствует и служит причиной усталости глаз.
- За счет механической инерции. Это свойство используется при управлении коллекторными двигателями постоянного тока. При правильно выбранной частоте регулирования двигатель не успевает затормозиться в бестоковых паузах.
Поэтому ШИМ применяют там, где решающую роль играет среднее значение напряжения или тока. Кроме упомянутых распространенных случаев, методом PWM регулируют средний ток в сварочных аппаратах и зарядных устройствах для аккумуляторных батарей и т.д.
Если естественное усреднение невозможно, во многих случаях эту роль на себя может взять уже упомянутый фильтр низкой частоты (ФНЧ) в виде RC-цепочки. Для практических целей этого достаточно, но надо понимать, что без искажений выделить исходный сигнал из ШИМ с помощью ФНЧ невозможно. Ведь спектр PWM содержит бесконечно большое количество гармоник, которые неизбежно попадут в полосу пропускания фильтра. Поэтому не стоит строить иллюзий по поводу формы восстановленной синусоиды.
Очень эффективно и эффектно управление методом ШИМ RGB-светодиодом. Этот прибор имеет три p-n перехода – красный, синий, зеленый. Изменяя раздельно яркость свечения каждого канала, можно получить практически любой цвет свечения LED (за исключением чистого белого). Возможности по созданию световых эффектов с помощью PWM безграничны.
Наиболее употребительная сфера применения цифрового сигнала, промодулированного по длительности импульса – регулирование среднего тока или напряжения, протекающего через нагрузку. Но возможно и нестандартное использование этого вида модуляции. Все зависит от фантазии разработчика.
Что такое импульсный блок питания и где применяется
Чем отличаются аналоговый сигнал от цифрового — примеры использования
Преобразователи напряжения с 12 на 220 вольт
Как работает транзистор и где используется?
Режимы работы, описание характеристик и назначение выводов микросхемы NE555
Что такое выпрямитель напряжения и для чего нужен: типовые схемы выпрямителей
ШИМ контроллер: принцип работы
ШИМ сигналом управляет ШИМ контроллер. Он управляет силовым ключом благодаря изменениям управляющих импульсов. В ключевом режиме транзистор может быть полностью открытым или полностью открытым. В закрытом состоянии через p-n-переход идет ток не больше нескольких мкА, то есть мощность рассеивания близка к нулю. В открытом состоянии идет большой ток, но так как сопротивление p-n-перехода мало, происходят небольшие теплопотери. Больше тепла выделяется в при переходе из одного состояния в другое. Однако благодаря быстроте переходного процесса в сравнении с частотой модуляции, мощность этих потерь незначительна.




Все это позволило разработать высокоэффективный компактный широтно импульсный преобразователь, то есть с малыми теплопотерями. Резонансные преобразователи с переключением в 0 тока ZCS позволяют свести теплопотери к минимуму.
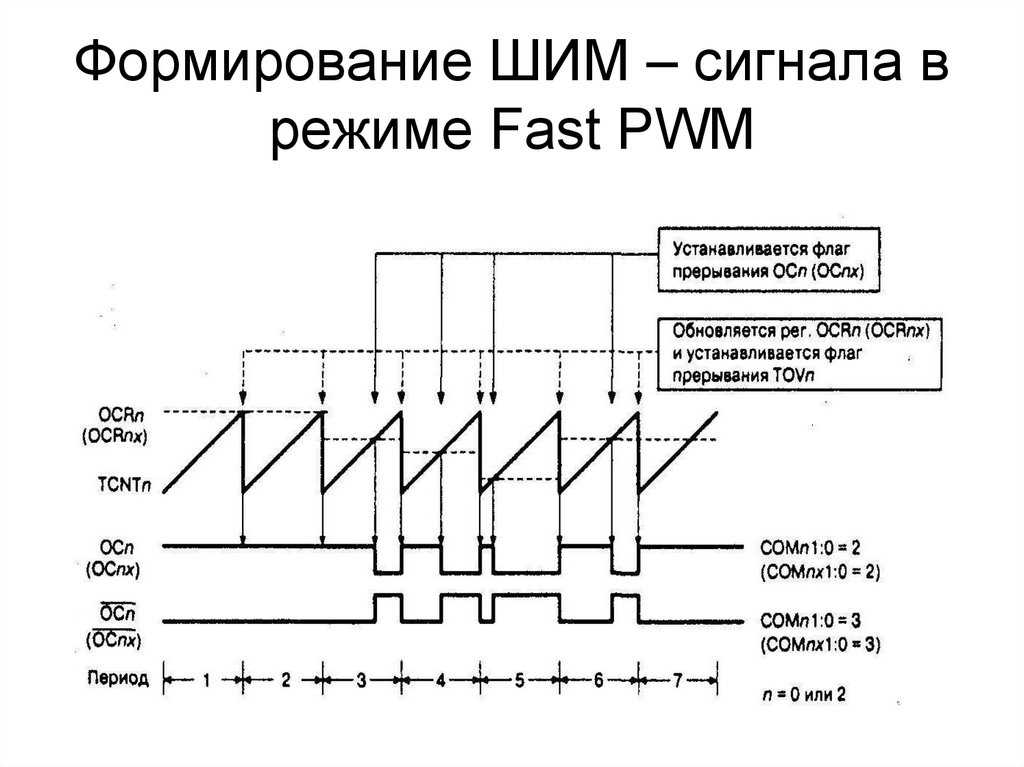
Аналоговая ШИМ
В аналоговых ШИМ-генераторах управляющий сигнал формируется при помощи аналогового компаратора, когда на его инвертирующий вход подается пилообразный или треугольный сигнал, а на неинвертирующий — непрерывный модулирующий.
Выходные импульсы идут прямоугольной формы. Частота их следования соответствует частоте пилы, а длительность плюсовой части импульса зависит от времени, когда уровень постоянного модулирующего сигнала, идущего на неинвертирующий вход компаратора, выше уровня пилообразного сигнала, подающегося на инвертирующий вход. В период когда напряжение пилообразного сигнала будет превышать модулирующий сигнал — на выходе будет фиксироваться отрицательная часть импульса.
Во время когда пилообразный сигнал подается на неинвертирующий вход, а модулирующий — на инвертирующий, выходные прямоугольные импульсы будут положительными, когда напряжение пилы будет выше уровня модулирующего сигнала на инвертирующем входе, а отрицательное — когда напряжение пилы станет ниже сигнала модулирующего.
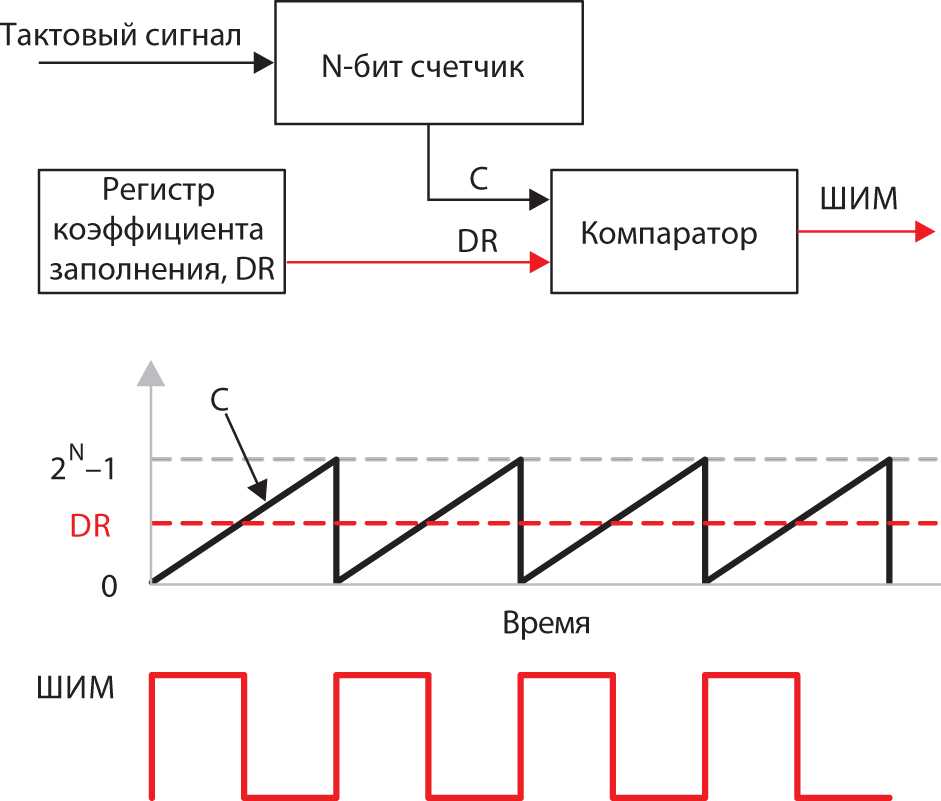
Цифровая ШИМ
Работая с цифровой информацией, микроконтроллер может формировать на выходах или 100% высокий или 0% низкий уровень напряжения. Но для эффективного управления нагрузкой такое напряжение на выходе нужно изменять. Например, когда осуществляется регулировка скорости вращения вала мотора или при изменении яркости светодиода.
Вопрос решают ШИМ контроллеры. То есть, 2-хуровневая импульсно-кодированная модуляция — это серия импульсов, характеризующаяся частотой 1/T и либо шириной Т, либо шириной 0. Для их усреднения применяется передискретизация. При цифровой ШИМ прямоугольные подимпульсы, которыми и заполнен период, могут занимать любое место в периоде. Тогда на среднем значении сигнала за период сказывается лишь их количество. Так как процесс осуществляется на частоте в сотни кГц, можно добиться плавной регулировки. ШИМ контроллеры решают эту задачу.
Можно провести следующую аналогию с механикой. Когда маховик вращается при помощи двигателя, при включенном двигателе маховик будет раскручиваться или продолжать вращение, если двигатель выключен, маховик будет тормозить из-за сил трения. Однако, если движок включать/выключать на несколько секунд, вращение маховика будет держаться на определенной скорости благодаря инерции. Чем дольше период включения двигателя, тем быстрее раскрутится маховик. Аналогично работает и ШИМ модулятор. Так работают ШИМ контроллеры, в которых переключения происходят в секунду тысячи раз, и частоты могут достигнуть единиц мегагерц.
Использование ШИМ-контроллеров обусловлено их следующими преимуществами:
- стабильностью работы;
- высокой эффективностью преобразования сигнала;
- экономией энергии;
- низкой стоимостью.
Получить на выводах микроконтроллера (МК) ШИМ сигнал можно:
- аппаратным способом;
- программным способом.
В каждом МК есть встроенный таймер, генерирующий ШИМ импульсы на определённых выводах. Это аппаратный способ. Получение ШИМ сигнала при помощи команд программирования более эффективно за счет разрешающей способности и дает возможность задействовать больше выводов. Но программный способ вызывает высокую загрузку МК, занимая много памяти.
Диагностика неисправностей
Одна из часто встречающихся проблем — пробой ключевых транзисторов. Результаты можно увидеть не только при попытке запуска устройства, но и при его обследовании с помощью мультиметра.
Кроме того, существуют и другие неисправности, которые несколько сложнее обнаружить. Перед тем как проверить ШИМ-контроллер непосредственно, можно рассмотреть самые распространенные случаи поломок. К примеру:
- Контроллер глохнет после старта — обрыв петли ОС, перепад по току, проблемы с конденсатором на выходе фильтра (если таковой имеется), драйвером; возможно, разладилось управление ШИМ-контроллером. Надо осмотреть устройство на предмет сколов и деформаций, замерить показатели нагрузки и сравнить их с типовыми.
- ШИМ-контроллер не стартует — отсутствует одно из входных напряжений или устройство неисправно. Может помочь осмотр и замер выходного напряжения, в крайнем случае, замена на заведомо рабочий аналог.
- Напряжение на выходе отличается от номинального — проблемы с петлей ООС или с контроллером.
- После старта ШИМ на БП уходит в защиту при отсутствии КЗ на ключах — некорректная работа ШИМ или драйверов.
- Нестабильная работа платы, наличие странных звуков — обрыв петли ООС или цепочки RC, деградация емкости фильтра.
Широтно-импульсная модуляция — ШИМ
Разберем понятие ШИМ на примере управления скоростью вращения двигателя постоянного тока. Поставим своей целью запустить мотор на 50% от его максимальной скорости. Пусть наш двигатель идеальный и чтобы достичь заданной скорости, нам нужно в единицу времени передавать на мотор в два раза меньше мощности. Как это сделать, не меняя источник питания?
Проведем мысленный эксперимент (а кто-то может и натуральный — ничего сложного). Возьмём мотор постоянного тока с массивным маховиком, закрепленным на валу (таким маховиком может служить колесо). Подадим питание от аккумулятора и мотор начнет набирать обороты. Через какое-то время, мотор достигнет номинальной мощности, а его ротор максимальной скорости вращения. Отключим питание, и мотор постепенно начнет замедляться вплоть до полной остановки.
Следующий опыт. Снова включим мотор, и когда его скорость достигнет половины от максимальной — выключим. Заметив, что скорость падает — снова включим. И так далее. Включая и выключая питание мотора, мы заставим ротор вращаться со скоростью, близкой к половине от максимальной!
Разумеется, в силу человеческой медлительности, мотор будет удерживать заданную скорость с некоторой погрешностью. Другими словами, скорость будет «плавать» вокруг заданного значения. Чтобы минимизировать эти отклонения, нам потребуется увеличить частоту переключений. Тут уже не обойтись без автоматики.
А как заставить мотор вращаться медленнее или быстрее? Количество переданной мотору энергии будет зависеть от отношения времени когда мотор включен — tвкл к времени когда он выключен — tвыкл.
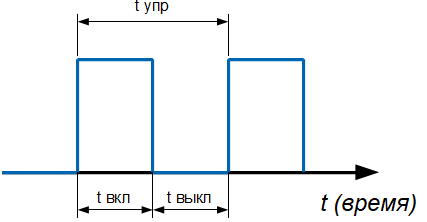
Так, для передачи мотору 50% мощности, tвкл будет равно tвыкл. Такой случай как раз изображен на графике. Чтобы мотор вращался еще медленнее, скажем с мощностью 25% от номинальной, придется время включения мотора уменьшить до этих самых 25% от общего периода управления T.
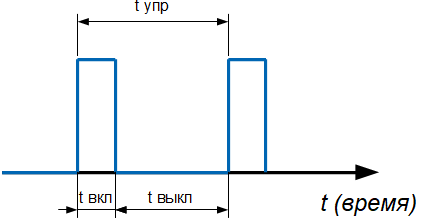
Таким образом, имея возможность менять ширину импульсов, мы можем достаточно точно управлять скоростью вращения мотора.
Собственно, рассмотренный способ управления мощностью и называется широтно-импульсной модуляцией сигнала, а сокращённо — ШИМ. Теперь рассмотрим параметры которые характеризуют ШИМ сигнал и которые следует учитывать при написании программ для микроконтроллеров.
Коэффициент заполнения (duty cycle)
Начнем с самого главного параметра — коэффициента заполнения D (он же duty cycle). Этот коэффициент равен отношению периода ШИМ сигнала к ширине импульса:
D = T / tвкл
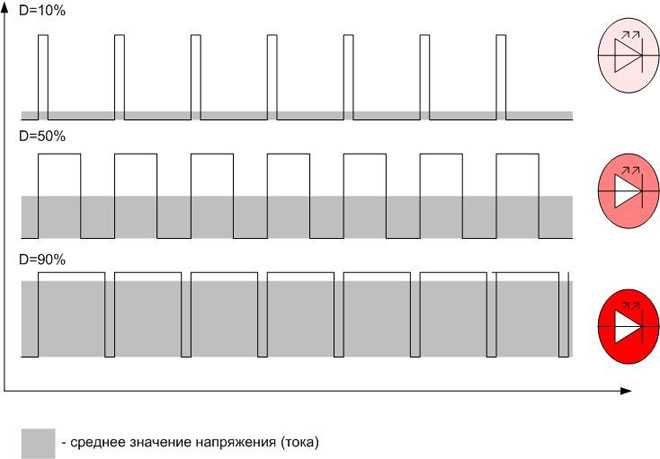
Пример ШИМ сигнала для разных значений D:

Чем больше D, тем больше мощности мы передаем управляемому устройству, например, двигателю. Так, при D = 1 двигатель работает на 100% мощности, при D = 0,5 — наполовину мощности, при D = 0 — двигатель полностью отключен.
Кстати, кроме коэффициента заполнения для характеризации ШИМ применяют и другой параметр — скважность S. Эти два параметра связаны выражением:. S = 1/T
S = 1/T
Скважность, как и коэффициент заполнения — величина безразмерная. В отличие от D, она может принимать значения от 1 до бесконечности
Но чаще всего, особенно в англоязычных источниках, используют именно D.
Частота ШИМ
Частота ШИМ определяет период импульса — T (см картинку выше). Требования к этой частоте диктуются несколькими факторами, в зависимости от типа управляемого устройства.



В случае управления светодиодами одним из главных факторов становится видимость мерцания. Чем выше частота, тем менее заметно мерцание излучаемого света. Высокая частота также помогает снизить влияние температурных скачков, которые светодиоды не любят. На практике для светодиодов достаточно иметь частоту ШИМ в пределах 100-300 Гц.
С моторами постоянного тока дела обстоят немного иначе. С одной стороны, чем больше частота, тем более плавно и менее шумно работает мотор. С другой — на высоких частотах падает крутящий момент. Нужен баланс. Более подробно о моторах мы поговорим в одной из будущих статей, а пока рекомендуем для большинства DIY задач использовать частоту ШИМ 2кГц.
Плюс, общая проблема для всех случаев управления силовой нагрузкой — потери в цепях силовой коммутации (в транзисторах, и не только), которые увеличиваются с ростом частоты ШИМ. Чем больше частота, тем большее время транзисторы находятся в переходных состояниях, активно выделяя тепло и снижая эффективность системы.
Разрешение ШИМ
Ещё один важный параметр — разрешение ШИМ сигнала. Этот параметр показывает, с какой точностью мы можем менять коэффициент заполнения. Чем больше разрешение, тем плавнее будет меняться мощность на управляемом устройстве.
Например, у платы Ардуино с базовыми настройками, разрешение ШИМ — 256. То есть мы можем изменять сигнал от 0 до 255 — не густо, но для большинства DIY задач хватает.
Подведём итог ремонта
По нынешним меркам кризиса и роста цен, кто-нибудь, житель крупных городов, имеющий высокую по российским меркам зарплату, может скажет что сэкономлена не бог весть какая сумма, больше времени своего потрачено было. Но если вернуться к тому, что сейчас на дворе очередной кризис, экономия данной суммы для большинства людей умеющих держать в руках паяльник, проводить диагностику приборов и умеющих считать деньги, вряд ли была бы лишней, пусть даже для сборки своего личного системного блока. А раз так – то люди, имеющие опыт и практические знания в области электроники, уже имеют плюс по сравнению с людьми, которые этих знаний не имеют, а соответственно не имеют и данной возможности. Всем удачных ремонтов, автор статьи AKV.